Servomotore CC di precisione 46S/12V-8C1

Caratteristiche di base del servomotore DC: (altri modelli, le prestazioni possono essere personalizzate)
| 1.Tensione nominale: | CC 12 V | 5.Velocità nominale: | ≥ 2600 giri/min |
| 2. Intervallo di tensione operativa: | CC 7,4 V-13 V | 6.Blocco della corrente: | ≤2,5 A |
| 3.Potenza nominale: | 25 W | 7. Corrente di carico: | ≥1A |
| 4. Direzione di rotazione: | L'albero di uscita CW è sopra | 8. Gioco dell'albero: | ≤1,0 mm |
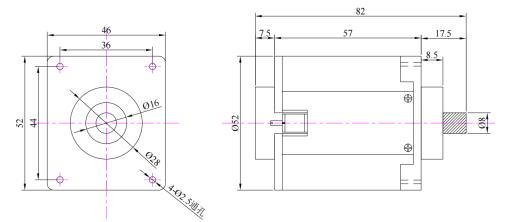
Diagramma dell'aspetto del prodotto
Tempo di scadenza
Dalla data di produzione, il periodo di utilizzo sicuro è di 10 anni, orario di lavoro continuo ≥2000 ore.
Caratteristiche del prodotto
1. Design compatto e salvaspazio;
2. Struttura portante a sfere;
3, spazzolare una lunga durata;
4, l'accesso esterno della spazzola consente una facile sostituzione in grado di prolungare ulteriormente la vita del motore;
5. Coppia di spunto elevata;
6, può effettuare la frenata dinamica per fermarsi più velocemente;
7. Rotazione reversibile;
8. Collegamento semplice a due fili;
9, isolamento di grado F, utilizzando il commutatore di saldatura ad alta temperatura.
Applicazioni
È ampiamente utilizzato nella casa intelligente, nelle apparecchiature mediche di precisione, nel settore della guida automobilistica, nelle serie di prodotti elettronici di consumo, nelle apparecchiature per massaggi, negli strumenti per la cura personale, nella trasmissione robotica intelligente, nell'automazione industriale, nelle apparecchiature meccaniche automatiche, nei prodotti digitali e in altri campi.
Principio di funzionamento del servomotore
Finché il servo dipende dall'impulso per posizionarsi, sostanzialmente si può intendere in questo modo, il servomotore riceve un impulso, ruoterà dell'angolo corrispondente di un impulso, in modo da ottenere lo spostamento. Poiché il servomotore stesso ha la funzione di inviare impulsi, verrà inviato il numero corrispondente di impulsi per ciascun angolo di rotazione del servomotore. In questo modo, l'impulso ricevuto dal servomotore viene ripetuto, detto anello chiuso. In questo modo, il sistema saprà quanti impulsi vengono inviati al servomotore e quanti impulsi vengono ricevuti indietro, in modo che possa essere un controllo molto preciso della rotazione del motore, in modo da ottenere un posizionamento accurato, che può raggiungere 0,001 mm .
Illustrazione delle prestazioni










